Dragline Excavation Prototype Develops 3D Vision
19 November 2015, BRISBANE: Global mining technology company MineWare continues to lead the way in dragline mining innovation, recently completing stage one of its ACARP project in collaboration with CRCMining and the University of Queensland.
Funded by an ACARP grant of more than $600,000—as well as in-kind support from MineWare and CRCMining—the joint R&D project aims to develop futuristic dig sequencing technology.
MineWare CEO and project co-leader Andrew Jessett said that this stage of the project has focused on the design of the dragline excavation sequencing system, underpinned by a sophisticated algorithmic approach combining real-time DTM scanner technology, 3D mine plan profiles and operator feedback.
“Leveraging MineWare digital terrain mapping capability, the dragline excavation sequencing system will act as an on-board supervisor that can continually monitor the state of the excavation and guide operators to compute the optimal dig sequence,” he said.
“Using two boom-point lasers, the dragline swings as part of its typical operation across the terrain
to create a 3D map of the pit, providing an effective formula for future sequences including where to position, where to dig and where to dump.”
The prototype’s algorithmic approach effectively creates a strategy for excavating material along the strip to reduce cycle times, improve utilisation of spoil and the rate of lineal advance, as well as maximise productivity.
In stage two of the project, the team will trial the algorithm on a fully operational production dragline, integrated into MineWare’s Pegasys Dragline Monitoring system.
“During this stage, operator visualisation and supervisor report tools will be developed to analyse operator-based sequencing of excavation against the sequencing algorithm,” Jessett continued.
“From there we can then move towards developing algorithms that sequence dragline excavation operations applicable to low-wall extended-key/chop with in-pit bench operations, under a range of circumstances, with a future application in dragline automation.”
About ACARP
ACARP is a collaborative program that utilises the experience and technical strength of both the coal mining industry and research institutions in solving technical problems and addressing issues of significance to the industry’s long term future. ACARP provides a critical leadership role in assisting Australia’s coal industry to develop and adopt world leading sustainable mining practices through industry collaboration. Safety and environment remain key drivers in the program and will continue to be the focus of much of the underground work and a significant component of the open cut and coal preparation programs.
About MineWare
MineWare is a global leader in the development of advanced dragline and shovel monitoring technologies for the global surface mining industry. Since creating the industry’s first fully integrated dragline monitor in 2005 for coal leader BHP Billiton Mitsubishi Alliance, the company has continued to advance its core technologies including the Pegasys dragline monitor, Argus shovel performance system and remote monitoring and data visualisation tool mRoc Desktop.
Celebrating its 10th anniversary this year, MineWare continues to support a growing client base of mining organisations around the world. MineWare’s team in Australia, South Africa and the Americas is improving the performance and productivity of more than 120 draglines and shovels around the globe.
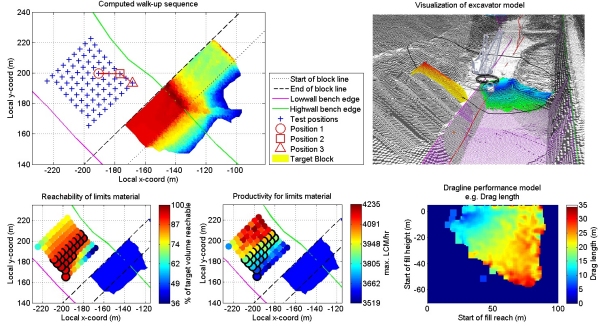
FIGURE 1. COMPUTING DRAGLINE EXCAVATION SEQUENCES – THE SEQUENCING ALGORITHM COMPUTES THE WALK-UP SEQUENCE TO
EXCAVATE A BLOCK BY USING MODELS OF DRAGLINE GEOMETRY, PERFORMANCE AND TERRAIN INTERACTION TO:
(i) IDENTIFY THE MATERIAL THAT CAN BE REACHED FROM DIFFERENT POSITIONS
(ii) DETERMINE HOW THAT MATERIAL WILL FIT IN THE AVAILABLE SPOIL ROOM
(iii) ESTIMATE THE PRODUCTIVITY OF EXCAVATING THAT MATERIAL TO SPOIL.
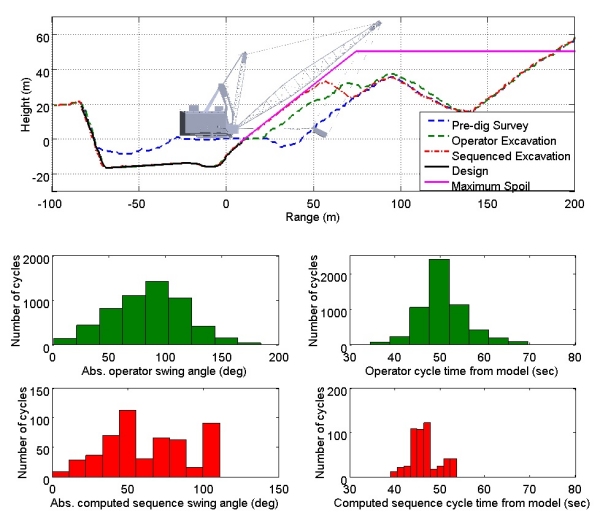
FIGURE 2. COMPARISON WITH OPERATOR EXCAVATION – SIMULATION OF THE COMPUTED SEQUENCE SHOWS MORE EFFECTIVE USE OF
AVAILABLE SPOIL ROOM AND A REDUCTION IN THE AVERAGE SWING ANGLE AND CYCLE TIME REQUIRED TO COMPLETE THE EXCAVATION,
AS COMPARED TO HOW THE OPERATORS EXCAVATED THE STRIP. NOTE THAT CYCLE TIME OF BOTH THE COMPUTED-SEQUENCE AND
OPERATOR-DRIVEN EXCAVATIONS ARE NORMALIZED THROUGH THE DRAGLINE PERFORMANCE MODEL TO PROVIDE AN EQUITABLE
COMPARISON.
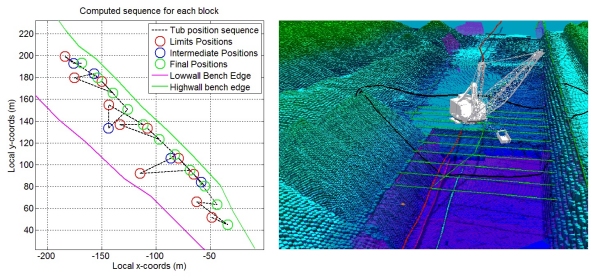
FIGURE 3. SIMULATION OF SEQUENCED EXCAVATION, SHOWING VISUALIZATION OF DTM DATA AND THE DRAGLINE’S INTERACTION
WITH THAT TERRAIN TO EXCAVATE THE COMPUTED SEQUENCE TO SPOIL IN COMPLIANCE WITH THE STRIP DESIGN.

{{ commodity.name }}
{{ post.title }}
{{ post.date }}



Comments