Introduction
Demands on fixed wing drones are growing continually. Other than copter drones, fixed wing platforms are generally used to cover large areas (hundreds of hectares) in a short amount of time. Standards on flight endurance and efficient area coverage are growing throughout different industries such as surveying, agriculture, mining or surveillance.
To create a high quality 3D model of a survey area sensor performance and image overlap are essential. Sensor and drone platform have to compensate for the effects of wind and turbulences causing blurred images and low image overlap. From day one QuestUAV has been developing gimballed systems and fine tuning platform stability in order to gain maximum quality and performance from a flight mission. The following sections outline the importance of image quality and overlap and show how a gimballed system can increase efficiency by more than 15 percent.
Drone-Based Maps and 3D Models
Image overlap is crucial…
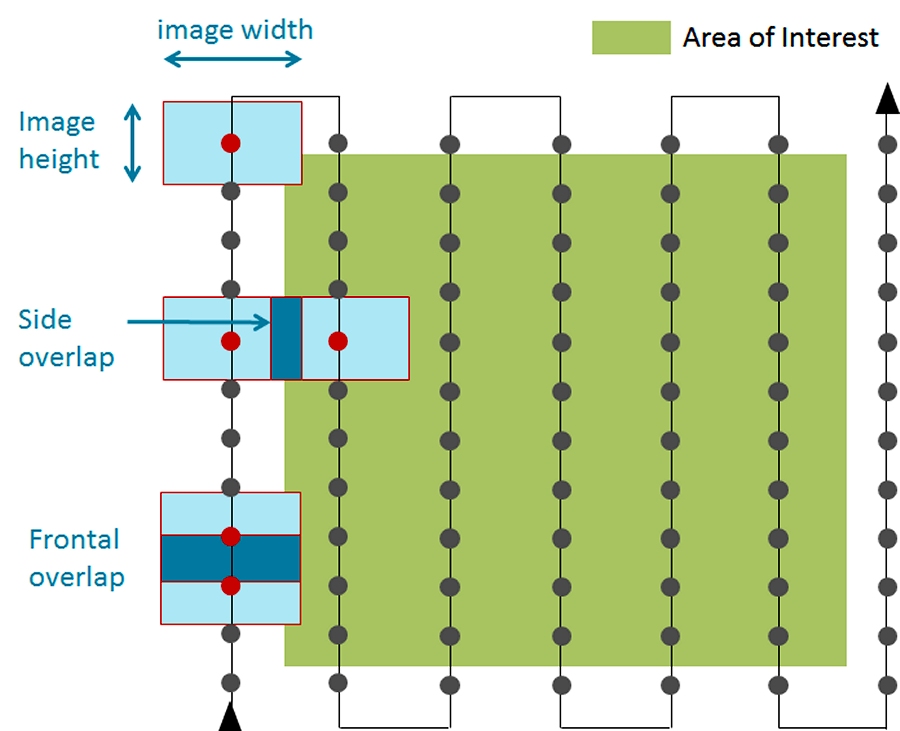
When mapping an area with a drone or Unmanned Aerial Vehicle (UAV), the UAV will have to fly and photograph the survey area in a grid-like pattern ensuring that every feature on the ground (e.g. a tree or a building) is “seen” in multiple photographs. For the generation of 3D models these photographs have to have sufficient overlap in flight direction and between grid lines (side overlap). Photogrammetry software providers like Pix4D or Agisoft Photoscan generally recommend an overlap of 75% frontal and 60% side overlap.
Sensor choice and gimbal influence data quality…
Besides image overlap, GSD (Ground Sampling Distance) is crucial for modelling an object in high detail. Hence, a good sensor and a UAV system which enables a stable flight and continuous overlap are essential for the generation of high quality maps and 3D models, especially in windy and turbulent conditions. Image sharpness and overlap can significantly deteriorate when the UAV is pushed around in moving air. Therefore, a sensor gimbal might become crucial for data quality, spatial accuracies and hence for mission success. Various QuestUAV missions have proven that a gimballed system compensates for effects like blurred or oblique images and lack of overlap.
Stereo-photogrammetry to extract 3D positions…
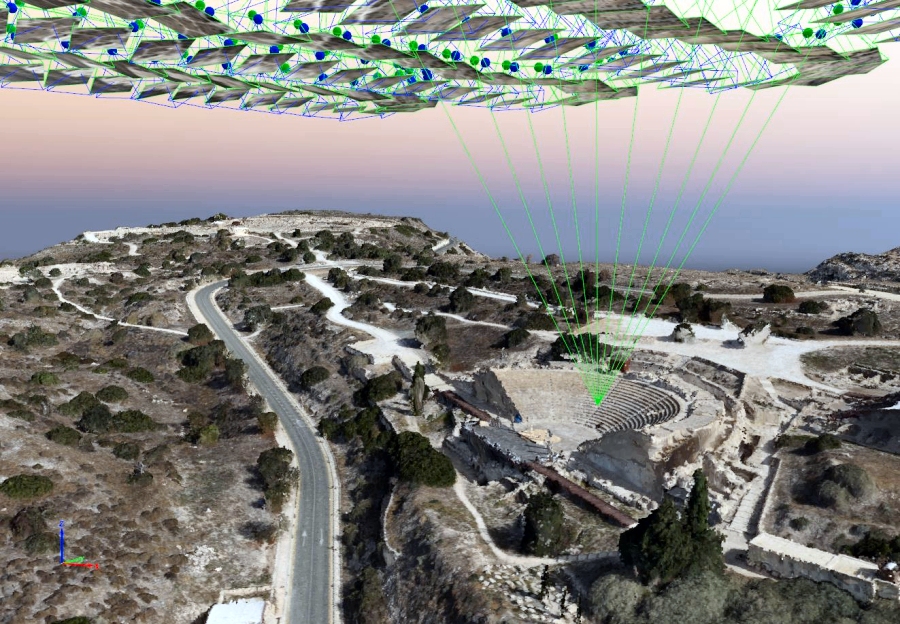
Once a feature is photographed from different angles stereo-photogrammetry can be applied after flight during the post-processing phase. Common points are identified in each image and a line of sight (or ray) can be constructed from the camera location to the point on the object. The intersection of these rays determines the three-dimensional location of the point and in combination a 3D model of the surveyed area.
QuestUAV Gimballed Systems
The sensor is the heart of a UAV and depending on which sensor is flown it will determine what data a UAV is capable of collecting. Ground Sampling Distance (GSD), image sharpness and noise level are all dependent on the sensor chosen for a flight mission. As an example the QuestUAV 200 Surveyor carries a Sony A6000 camera which captures very high detail with a 24.3 effective megapixel APS-C sensor allowing to acquire data down to 2.9cm GSD at 400ft. The Exmor APS HD CMOS sensor ensures an extremely fast performance, sharp image quality and low noise images, even in low light conditions.

The major advantage of a gimbal is simply to allow the sensor to continuously point directly towards the ground (nadir view), while the aircraft itself is manoeuvring around in yaw, pitch and roll. Especially in high winds a compensation for the movement is essential to keep the image overlap required for photogrammetry processing. If there is no gimbal the general solution is to increase side overlap. However, increasing the side overlap causes the aircraft to fly more grid lines and turns and hence reduces area coverage and flight efficiency. Overlap recommendations by photogrammetry software providers are generally around 75-80% frontal and 60-65% side overlap.
QuestUAV Gimbals can reduce the image overlap to 40% and still guarantee the data quality.
Various studies with a QuestUAV 200 Surveyor and QuestUAV 100 DATAhawk have proven that a gimballed system allows reducing the image overlap from 65 to 40 percent and still guaranteeing enough overlap for photogrammetric processing and data quality even in high winds. By reducing the amount of grid lines and aircraft turns the already impressive ground coverage of a QuestUAV system is further increased. As shown in the figure below the amount of grid lines is reduced from 13 to 10 and the total path length from 10.1 km to 8.3km – a decrease of 18 percent!

(left) 65% side overlap (right) 40% side overlap
When compared to an orthomsaic based on 65 percent overlap the 40 percent overlap orthomosaic is equally good in terms of image matches and data quality. The number of overlapping images was in both cases continuously higher than five for each pixel of the orthomosaic resulting in an excellent 3D model of the surveyed area.
Summary
QuestUAV has proven that a sensor gimbal significantly improves the already outstanding ground coverage of a QuestUAV drone. The QuestUAV sensor gimbal compensates for the effects of wind and turbulences causing blurred images and low image overlap. By using a gimbal an area can be flown with only 40 percent side overlap without reduction in data quality. Hence, mission efficiency is increased by more than 15 percent.